Aktuell konzentrieren wir uns darauf, die wichtigsten Funktionen unseres Roboters auf ein neues Level zu bringen. Dabei geht es vor allem um die Weiterentwicklung einzelner Module, die für den späteren Einsatz entscheidend sind – von der Mechanik über die Energieversorgung bis hin zur Umgebungserkennung. Hier geben wir euch einen Einblick in die Bereiche, an denen wir gerade intensiv arbeiten und die für die nächsten Schritte im Projekt besonders relevant sind.
🤖 Mechanik: Roboterarm überarbeiten
Der Greifarm unseres Systems ist für manipulative Aufgaben wie das Öffnen von Türen, das Bedienen von Schaltern oder das Bewegen von Objekten zuständig. Wir arbeiten aktuell an der Optimierung der Kinematik, der Stabilität der Gelenkachsen sowie an einer präziseren Kraftübertragung, um unter variierenden Belastungen eine zuverlässige Steuerung und Rückmeldung zu gewährleisten.
🔊 Soundsystem integrieren
Zur Verbesserung der Mensch-Maschine-Kommunikation implementieren wir ein akustisches Feedbacksystem. Dieses ermöglicht es dem Roboter, über Zustandsmeldungen, Fehlermeldungen oder Rückmeldetöne mit der Bedienperson zu interagieren. In späteren Ausbaustufen ist auch die Ausgabe von Sprachausgaben zur Situationsbeschreibung oder Navigation geplant.
🔋 Akkusystem redesignen
Ein zentrales Ziel ist die Entwicklung eines effizienten und modular aufgebauten Energiemanagementsystems. Das neue Akkukonzept soll sowohl eine längere Laufzeit unter Volllast als auch eine flexible Austauschbarkeit ermöglichen. Zusätzlich wird auf verbesserte Ladetechnik und Schutzmechanismen gegen Tiefentladung und Überhitzung gesetzt.
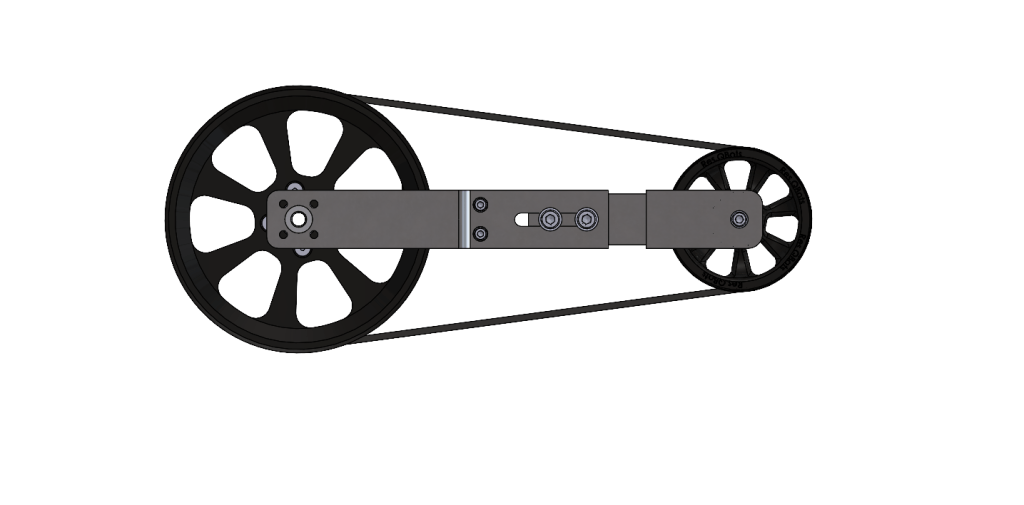
🔄 Flipper-Mechanik instand setzen
Die Flipper dienen dem Robotersystem zur Stabilisierung und Selbstrettung – z. B. beim Überwinden von Hindernissen oder beim Aufrichten nach einem Umkippen. Derzeit wird die Mechanik überarbeitet, um eine präzisere Steuerung und höhere Belastbarkeit im Gelände zu gewährleisten. Ziel ist eine robuste, zuverlässige Beweglichkeit auch bei unebenem Terrain.
📡 Lidar-System: Umgebungswahrnehmung & Kartierung
Unser Roboter ist mit einem Lidar-Sensor (Light Detection and Ranging) ausgestattet, der zur Umgebungserfassung und -kartierung dient. Der Sensor generiert fortlaufend 2D- oder 3D-Umgebungsdaten, aus denen digitale Karten erstellt und lokal gespeichert werden. Diese Karten sollen später nicht nur zur Navigation genutzt, sondern auch zur objektiven Analyse und Auswertung durch Rettungskräfte bereitgestellt werden können.

Hinterlasse einen Kommentar